《數(shù)控機(jī)床機(jī)械手的工作原理及應(yīng)用優(yōu)勢(shì)》由會(huì)員分享��,可在線閱讀�����,更多相關(guān)《數(shù)控機(jī)床機(jī)械手的工作原理及應(yīng)用優(yōu)勢(shì)(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�����。
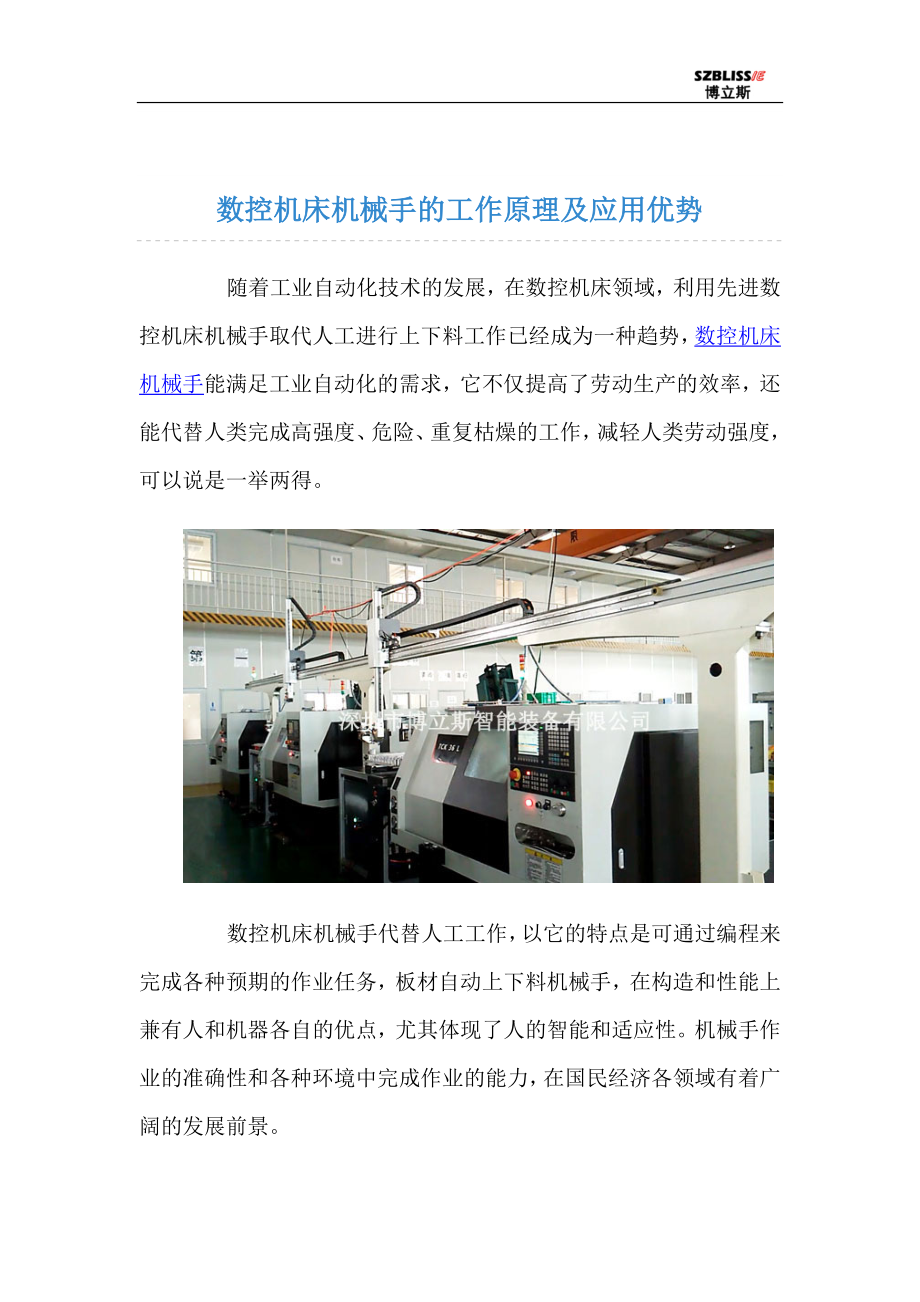
1���、 數(shù)控機(jī)床機(jī)械手的工作原理及應(yīng)用優(yōu)勢(shì) 隨著工業(yè)自動(dòng)化技術(shù)的發(fā)展�����,在數(shù)控機(jī)床領(lǐng)域,利用先進(jìn)數(shù)控機(jī)床機(jī)械手取代人工進(jìn)行上下料工作已經(jīng)成為一種趨勢(shì)���, 數(shù)控機(jī)床機(jī)械手 能滿足工業(yè)自動(dòng)化的需求����,它不僅提高了勞動(dòng)生產(chǎn)的效率����,還能代替人類(lèi)完成高強(qiáng)度、危險(xiǎn)�����、重復(fù)枯燥的工作�,減輕人類(lèi)勞動(dòng)強(qiáng)度,可以說(shuō)是一舉兩得����。 數(shù)控機(jī)床機(jī)械手代替人工工作,以它的特點(diǎn)是可通過(guò)編程來(lái)完成各種預(yù)期的作業(yè)任務(wù)���,板材自動(dòng)上下料機(jī)械手���,在構(gòu)造和性能上兼有人和機(jī)器各自的 優(yōu)點(diǎn)�,尤其體現(xiàn)了人的智能和適應(yīng)性�����。機(jī)械手作業(yè)的準(zhǔn)確性和各種環(huán)境中完成作業(yè)的能力���,在國(guó)民經(jīng)濟(jì)各領(lǐng)域有著廣闊的發(fā)展前景����。 數(shù)控機(jī)床機(jī)械手的工作原理是在 序操控的條件下���,選用氣壓
2���、傳動(dòng)方法,來(lái)完成執(zhí)行機(jī)構(gòu)的相應(yīng)部位發(fā)作規(guī)則需求的�,有次序,有運(yùn)動(dòng)軌道��,有必定速度和時(shí)刻的動(dòng)作�����。一起按其操控體系的信息對(duì)執(zhí)行機(jī)構(gòu)宣布指令�,必要時(shí)可對(duì)機(jī)械手的動(dòng)作進(jìn)行監(jiān)視,當(dāng)動(dòng)作有過(guò)錯(cuò)或發(fā)作毛病時(shí)即 宣布報(bào)警信號(hào)���。方位檢測(cè)設(shè)備隨時(shí)將執(zhí)行機(jī)構(gòu)的實(shí)踐方位反饋給操控體系����,并與設(shè)定的方位進(jìn)行比較��,然后經(jīng)過(guò)操控體系進(jìn)行調(diào)整�����,從而使執(zhí)行機(jī)構(gòu)以必定的精度到達(dá)設(shè)定方位�。 通過(guò)利用數(shù)控機(jī)床機(jī)械手與數(shù)控機(jī)床組合最終形成生產(chǎn)線,實(shí)現(xiàn)加工過(guò)程的自動(dòng)化和無(wú)人化�,可以提高勞動(dòng)生產(chǎn)率,降低成本�,并使生產(chǎn)線發(fā)展成為柔性制造系統(tǒng),適應(yīng)現(xiàn)代機(jī)械行業(yè)自動(dòng)化生產(chǎn)的要求����。應(yīng)用數(shù)控機(jī)械手可以代替人從事單調(diào)、重復(fù)或繁重的體力勞動(dòng)����, 實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動(dòng)化����,機(jī)床上下料機(jī)械手代替人在有害環(huán)境下的手工操作��,改善勞動(dòng)條件��,保證人身安全�����。如有需求���,歡 迎致電 博立斯 ���,更多自動(dòng)化設(shè)備: 博立斯 是一家專業(yè)從事工業(yè)機(jī)器人研發(fā)、生產(chǎn)和銷(xiāo)售的高新技術(shù)企業(yè)�,主要產(chǎn)品包括:機(jī)床自動(dòng)上料機(jī)械手、數(shù)控機(jī)床機(jī)械手�����、碼垛機(jī)器人�����、沖壓 沖床機(jī)械手 、關(guān)節(jié)工業(yè)機(jī)器人的研發(fā)生產(chǎn)�,各種自動(dòng)機(jī)械手的開(kāi)發(fā)和生產(chǎn)。對(duì)數(shù)控機(jī)床和 工中心進(jìn)行自動(dòng)化改造��,實(shí)現(xiàn)工件的自動(dòng)抓取�、上料�、下料、裝夾和加工等全部生產(chǎn)過(guò)程�,為機(jī)械加工企業(yè)提供專業(yè)化的自動(dòng)化解決方案。
 數(shù)控機(jī)床機(jī)械手的工作原理及應(yīng)用優(yōu)勢(shì)
數(shù)控機(jī)床機(jī)械手的工作原理及應(yīng)用優(yōu)勢(shì)