《轉(zhuǎn)子實(shí)驗(yàn)臺(tái)綜合實(shí)驗(yàn)》由會(huì)員分享����,可在線閱讀,更多相關(guān)《轉(zhuǎn)子實(shí)驗(yàn)臺(tái)綜合實(shí)驗(yàn)(8頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索��。
1�、轉(zhuǎn)子實(shí)驗(yàn)臺(tái)綜合實(shí)驗(yàn)
一. 實(shí)驗(yàn)?zāi)康?
通過(guò)本實(shí)驗(yàn)讓學(xué)生掌握回轉(zhuǎn)機(jī)械轉(zhuǎn)速、振動(dòng)��、軸心軌跡測(cè)量方法���,了解回轉(zhuǎn)機(jī)械動(dòng)平衡的概念和原理��。
二. 實(shí)驗(yàn)原理
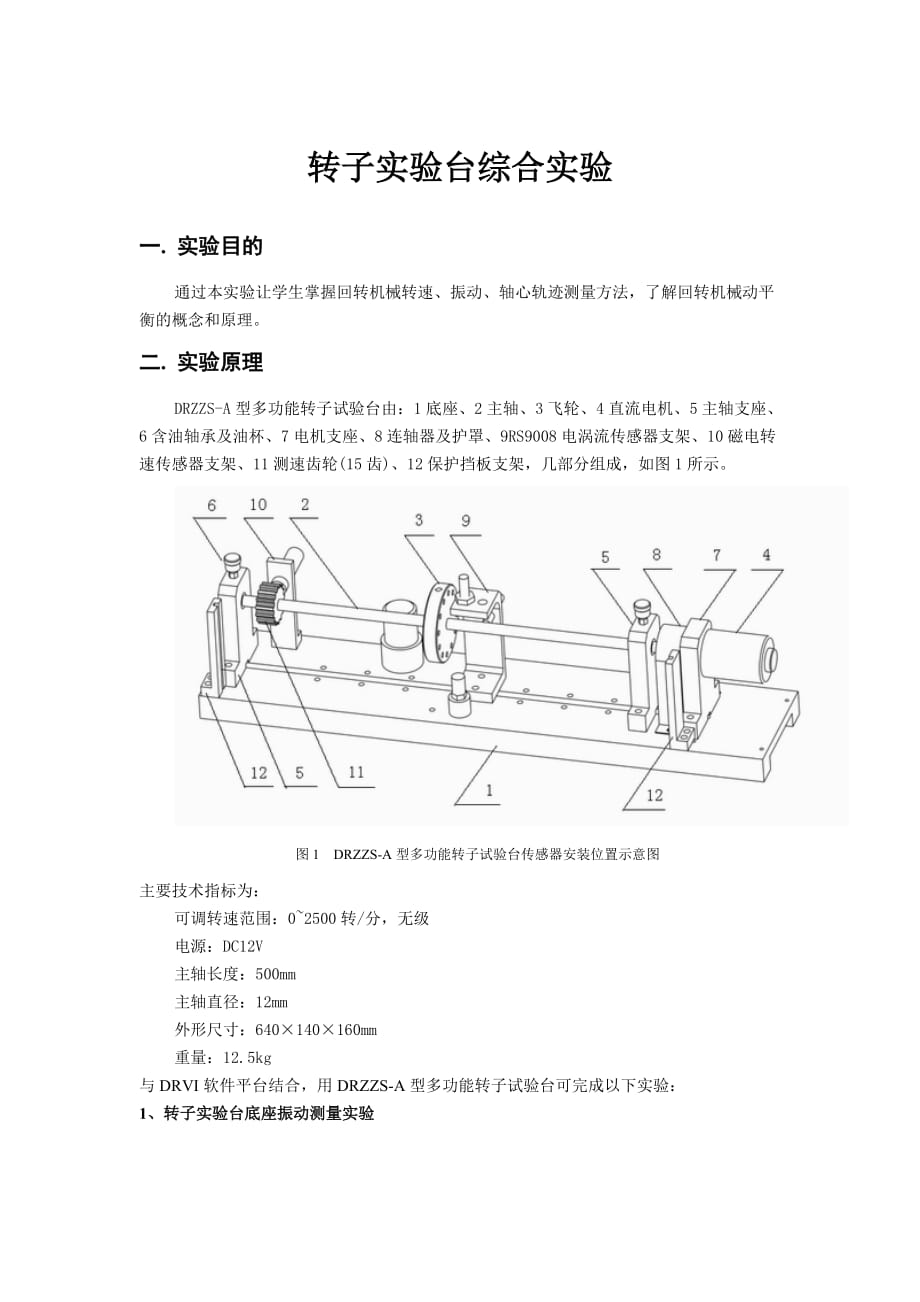
DRZZS-A型多功能轉(zhuǎn)子試驗(yàn)臺(tái)由:1底座�����、2主軸�、3飛輪、4直流電機(jī)�、5主軸支座、6含油軸承及油杯��、7電機(jī)支座����、8連軸器及護(hù)罩���、9RS9008電渦流傳感器支架�、10磁電轉(zhuǎn)速傳感器支架����、11測(cè)速齒輪(15齒)、12保護(hù)擋板支架��,幾部分組成�,如圖1所示��。
圖1 DRZZS-A型多功能轉(zhuǎn)子試驗(yàn)臺(tái)傳感器安裝位置示意圖
主要技術(shù)指標(biāo)為:
可調(diào)轉(zhuǎn)速范圍:0~2500轉(zhuǎn)/分���,無(wú)級(jí)
電源:DC12V
主軸長(zhǎng)度:500mm
主軸直徑:12
2、mm
外形尺寸:640140160mm
重量:12.5kg
與DRVI軟件平臺(tái)結(jié)合��,用DRZZS-A型多功能轉(zhuǎn)子試驗(yàn)臺(tái)可完成以下實(shí)驗(yàn):
1��、轉(zhuǎn)子實(shí)驗(yàn)臺(tái)底座振動(dòng)測(cè)量實(shí)驗(yàn)
圖2����、加速度和速度傳感器振動(dòng)測(cè)量
對(duì)于多功能轉(zhuǎn)子實(shí)驗(yàn)臺(tái)底座的振動(dòng),可采用加速度傳感器和速度傳感器兩種方式進(jìn)行測(cè)量����。將帶有磁座的加速度和速度傳感器放置在試驗(yàn)臺(tái)的底座上,將傳感器的輸出接到變送器相應(yīng)的端口�,再將變送器輸出的信號(hào)接到采集儀的相應(yīng)通道,輸入到計(jì)算機(jī)中����。
啟動(dòng)轉(zhuǎn)子試驗(yàn)臺(tái),調(diào)整轉(zhuǎn)速����。觀察并記錄得到的振動(dòng)信號(hào)波形和頻譜����,比較加速度傳感器和速度傳感器所測(cè)得的振動(dòng)信號(hào)特點(diǎn)�。觀察改變轉(zhuǎn)子試驗(yàn)臺(tái)轉(zhuǎn)速后,振動(dòng)信號(hào)�����、頻譜的
3���、變化規(guī)律�。
2�����、實(shí)驗(yàn)臺(tái)轉(zhuǎn)速測(cè)量
對(duì)于多功能轉(zhuǎn)子實(shí)驗(yàn)臺(tái)轉(zhuǎn)速��,可以分別采用光電轉(zhuǎn)速傳感器和磁電轉(zhuǎn)速傳感器進(jìn)行測(cè)量�����。
1)采用光電傳感器測(cè)量:
將反光紙貼在圓盤(pán)的側(cè)面�,調(diào)整光電傳感器的位置,一般推薦把傳感器探頭放置在被測(cè)物體前2~3cm����,并使其前面的紅外光源對(duì)準(zhǔn)反光紙,使在反光紙經(jīng)過(guò)時(shí)傳感器的探測(cè)指示燈亮�����,反光紙轉(zhuǎn)過(guò)后探測(cè)指示燈不亮(必要時(shí)可調(diào)節(jié)傳感器后部的敏感度電位器)����。當(dāng)旋轉(zhuǎn)部件上的反光貼紙通過(guò)光電傳感器前時(shí),光電傳感器的輸出就會(huì)跳變一次�����。通過(guò)測(cè)出這個(gè)跳變頻率f��,就可知圖3 反射式光電轉(zhuǎn)速傳感器
道轉(zhuǎn)速n�。
編寫(xiě)轉(zhuǎn)速測(cè)量腳本,將傳感器的信號(hào)將通過(guò)采集儀輸入到計(jì)算機(jī)中�����。啟動(dòng)轉(zhuǎn)子試驗(yàn)
4�、臺(tái)����,調(diào)節(jié)到一穩(wěn)定轉(zhuǎn)速��,點(diǎn)擊實(shí)驗(yàn)平臺(tái)面板中的“開(kāi)始”按鈕進(jìn)行測(cè)量�����,觀察并記錄得到的波形和轉(zhuǎn)速值��,改變電機(jī)轉(zhuǎn)速���,進(jìn)行多次測(cè)量���。
2)采用磁電傳感器測(cè)量:
將磁電傳感器安裝在轉(zhuǎn)子試驗(yàn)臺(tái)上專(zhuān)用的傳感器架上,使其探頭對(duì)準(zhǔn)測(cè)速用15齒齒輪的中部�����,調(diào)節(jié)探頭與齒頂?shù)木嚯x���,使測(cè)試距離為1mm。在已知發(fā)訊齒輪齒數(shù)的情況下���,測(cè)得的傳感器輸出信號(hào)脈沖的頻率就可以計(jì)算出測(cè)速齒輪的轉(zhuǎn)速���。如設(shè)齒輪齒數(shù)為N�����,轉(zhuǎn)速為n�����,脈沖頻率為f����,則有:n=f/N ��。
圖4 磁電轉(zhuǎn)速傳感器的工作方式
通常�����,轉(zhuǎn)速的單位是轉(zhuǎn)/分鐘��,所以要在上述公式的得數(shù)再乘以60�,才能轉(zhuǎn)速數(shù)據(jù),即n=60f/N����。在使用60齒的發(fā)訊齒輪時(shí)�,就可以得到一個(gè)
5�����、簡(jiǎn)單的轉(zhuǎn)速公式n=f��。所以��,就可以使用頻率計(jì)測(cè)量轉(zhuǎn)速�����。這就是在工業(yè)中轉(zhuǎn)速測(cè)量中發(fā)訊齒輪多為60齒的原因����。
編寫(xiě)轉(zhuǎn)速測(cè)量腳本,將傳感器的信號(hào)將通過(guò)采集儀輸入到計(jì)算機(jī)中���。啟動(dòng)轉(zhuǎn)子試驗(yàn)臺(tái)���,調(diào)節(jié)到一穩(wěn)定轉(zhuǎn)速,點(diǎn)擊實(shí)驗(yàn)平臺(tái)面板中的“開(kāi)始”按鈕進(jìn)行測(cè)量����,觀察并記錄得到的波形和轉(zhuǎn)速值,改變電機(jī)轉(zhuǎn)速���,進(jìn)行多次測(cè)量��。
3��、軸心軌跡測(cè)量
圖5 軸心軌跡測(cè)量
軸心軌跡是轉(zhuǎn)子運(yùn)行時(shí)軸心的位置����,在忽略軸的圓度誤差的情況下�,可以將兩個(gè)電渦流位移傳感器探頭安裝到實(shí)驗(yàn)臺(tái)中部的傳感器支架上,相互成90度�����,并調(diào)好兩個(gè)探頭到主軸的距離(約1.6mm)�,標(biāo)準(zhǔn)是使從前置器輸出的信號(hào)剛好為0(mV)。這時(shí)�,轉(zhuǎn)子實(shí)驗(yàn)臺(tái)啟動(dòng)后兩
6、個(gè)傳感器測(cè)量的就是它在兩個(gè)垂直方向(X,Y)上的瞬時(shí)位移��,合成為李沙育圖就是轉(zhuǎn)子的軸心運(yùn)動(dòng)軌跡���。
4�����、剛性轉(zhuǎn)子動(dòng)平衡
在實(shí)際工作過(guò)程中人們通常用單面加重三元作圖法進(jìn)行葉輪�、轉(zhuǎn)子等設(shè)備的現(xiàn)場(chǎng)動(dòng)平衡,以消除過(guò)大的振動(dòng)超差����。這一方法的優(yōu)點(diǎn)是設(shè)備簡(jiǎn)單——只需一塊測(cè)振表。但缺點(diǎn)是作圖分析的過(guò)程復(fù)雜��,不易被掌握��,而且容易出現(xiàn)錯(cuò)誤����。為此,我們?cè)谶@里介紹一種文獻(xiàn)中常見(jiàn)的簡(jiǎn)單易行的方法——單面現(xiàn)場(chǎng)動(dòng)平衡的三點(diǎn)加重法��。
假設(shè)在假設(shè)轉(zhuǎn)子上有一不平衡量m�,所處角度為α,用分量mx���、my表示不平衡量��。
mx=mcosα
my=msinα
為了確定不平衡量m的大小和位置α�,啟動(dòng)轉(zhuǎn)子在工作轉(zhuǎn)速下旋轉(zhuǎn),用測(cè)振設(shè)備
7�����、在一固定點(diǎn)測(cè)試振動(dòng)振速�����,設(shè)振速為V0�����,則存在下列關(guān)系
式中K為比例系數(shù)
P1(M,0)
α
120O
240O
0
x
y
m(mx,my)
圖6 三點(diǎn)加重法示意圖
在P1(α=0 )點(diǎn)加試重M���,啟動(dòng)轉(zhuǎn)子到工作轉(zhuǎn)速,測(cè)得振動(dòng)振速V1��,有如下關(guān)系:
用同樣的方式分別在P2(α=120o )和P3(α=240 o )點(diǎn)加試重M��,并測(cè)得振動(dòng)值V2 �����,V3,有如下關(guān)系:
從以上三式推導(dǎo)可得:
從而可以進(jìn)一步推得:
即由mx����,my計(jì)算不平衡質(zhì)量m和位置α。
圖7 軸心軌跡測(cè)
8���、量
配重盤(pán)
振動(dòng)傳感器
實(shí)驗(yàn)時(shí)在轉(zhuǎn)子實(shí)驗(yàn)臺(tái)的配重盤(pán)上選取一個(gè)位置(比如貼反光紙的位置)作為初始位置(即P1點(diǎn))�����,然后用轉(zhuǎn)子實(shí)驗(yàn)臺(tái)附件中的螺釘作為不平衡重����,加在配重盤(pán)上�。然后按上面方法進(jìn)行測(cè)量估算,得到不平衡重量和位置����。
三. 實(shí)驗(yàn)儀器和設(shè)備
1. 計(jì)算機(jī) 1臺(tái)
2. DRVI快速可重組虛擬儀器平臺(tái) 1套
3. 打印機(jī) 1臺(tái)
4. 轉(zhuǎn)子試驗(yàn)臺(tái) 1套
5. USB數(shù)據(jù)采集儀 1臺(tái)
四. 實(shí)驗(yàn)步驟
1.
9、關(guān)閉DRDAQ-USB型數(shù)據(jù)采集儀電源����,將需使用的傳感器連接到采集儀的數(shù)據(jù)采集通道上。(禁止帶電從采集儀上插拔傳感器,否則會(huì)損壞采集儀和傳感器)
2. 開(kāi)啟DRDAQ-USB型數(shù)據(jù)采集儀電源�。
3. 運(yùn)行DRVI主程序,點(diǎn)擊DRVI快捷工具條上的"聯(lián)機(jī)注冊(cè)"圖標(biāo)���,選擇其中的“DRVI采集儀主卡檢測(cè)”或“網(wǎng)絡(luò)在線注冊(cè)”進(jìn)行軟件注冊(cè)�。
4. 在DRVI地址信息欄中輸入WEB版實(shí)驗(yàn)指導(dǎo)書(shū)的地址��,在實(shí)驗(yàn)?zāi)夸浿羞x擇“轉(zhuǎn)子實(shí)驗(yàn)臺(tái)”���,建立實(shí)驗(yàn)環(huán)境。
五.實(shí)驗(yàn)結(jié)果
1�,加速度傳感器振動(dòng)測(cè)試結(jié)果
2,速度傳感器振動(dòng)測(cè)試結(jié)果
3��,多功能轉(zhuǎn)子實(shí)驗(yàn)臺(tái)磁電傳感器轉(zhuǎn)速測(cè)量
4��,軸心軌跡測(cè)量
5��,剛性轉(zhuǎn)子動(dòng)平衡
配重盤(pán)有一個(gè)負(fù)重時(shí)
配重盤(pán)有兩個(gè)負(fù)重時(shí)
配重盤(pán)有三個(gè)負(fù)重時(shí)
 轉(zhuǎn)子實(shí)驗(yàn)臺(tái)綜合實(shí)驗(yàn)
轉(zhuǎn)子實(shí)驗(yàn)臺(tái)綜合實(shí)驗(yàn)